
.
livello elementare.
ARGOMENTO: STORIA NAVALE
PERIODO: XX SECOLO
AREA: OPERAZIONI MILITARI
parole chiave: Droni navali, USN, USMC
A metà degli anni ’50, la forza sottomarina sovietica stava diventando sempre più minacciosa in termini di dimensioni (oltre 300 unità) e capacità e la US Navy cercava di sviluppare sistemi che fossero in grado di contrastare tale minaccia prima che qualsiasi battello avversario potesse avvicinarsi a distanza di tiro da una task force, dalle navi maggiori o da un convoglio. Venne impostato un massiccio programma di nuove costruzioni e di conversione di unità ancora valide, alcune risalenti alla non ancora lontana guerra mondiale, adeguandole prioritariamente alla lotta Anti Sommergibili dotandole di moderni sensori di scoperta a cui dovevano corrispondere sistemi d’arma adeguati come portata e capacità di distruzione dei nuovi mezzi sovietici.
La componente aerea, la tradizionale ala fissa e gli elicotteri che stavano assumendo una grande importanza con sempre maggiori capacità, ma anche pesi e dimensioni difficilmente compatibili, risultava fondamentale per il contrasto della minaccia subacquee, ma imponeva l’impiego di costosissime (e numericamente limitate) portaerei di scorta. La US Navy era alla ricerca di soluzioni meno costose e complesse, ma non si sperava fossero disponibili in tempi brevi. In quel periodo, marine, come quelle britannica e sovietica, svilupparono elicotteri medio/pesanti con equipaggio per sfruttare i rilevamenti dei sonar di bordo, ma questi elicotteri, come nella stessa US Navy, dipendevano da unità con complessi e completi servizi aerei
Le unità per la caccia AS erano però fregate e cacciatorpediniere ed i piloti navali non erano favorevoli all’idea di impiegare elicotteri da piattaforme contigue a sovrastrutture di notevoli dimensioni tipiche di questi tipi di unità, di piccole dimensioni e molto mobili, che dovevano operare in condizioni di mare mosso. La US Navy, malgrado la grande esperienza della sua componente aerea, optò per lo sviluppo di un elicottero senza equipaggio, una sfida decisamente maggiore di quella di un più “semplice velivolo” radiocomandato ad ala fissa. Si trattava di realizzare un elicottero in grado di portare un notevole carico utile, dotato di una notevole autonomia ed ampio raggio di azione destinato alla US Navy per soddisfare le nuove esigenze.
La Gyrodyne, una piccola azienda che aveva approntato un prototipo chiamato Rotorcycle e destinato a trasportare un solo marine e la sua attrezzatura, si impegnò nell’adattamento e nello sviluppo di un mezzo molto più complesso, che sarebbe divenuto il DASH, acronimo per Drone Anti-Submarine Helicopter.

un QH-50 in fase di test decollato dalla USS Nicholas – Fonte USN – Gyrodyne QH-50 (cropped).jpg – Wikimedia Commons
.jpg){kind=link}
Il Corpo dei Marines (USMC) aveva sino ad allora valutato due prototipi di Rotorcycle, chiamati XRON-1 (il cui primo volo risaliva al 1956) e tre YRON-1 di preserie, e si sperava che il nuovo mezzo per la marina statunitense, denominato DSN-1, fosse quasi una “semplice” modifica del progetto già disponibile.
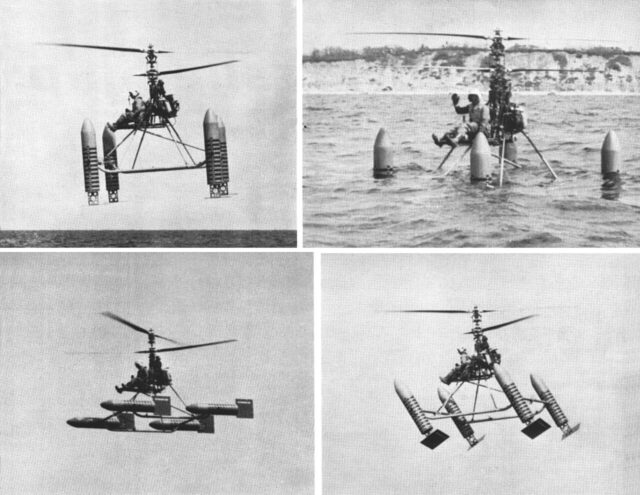
Elicottero Gyrodyne RON Rotorcycle in fase di ammaraggio, probabilmente alla fine degli anni ’50 – Fonte: rivista U.S. Navy All Hands, febbraio 1965, pp. 14-15. Autore: Dipartimento della Difesa degli Stati Uniti Gyrodyne RON Rotorcycle making water landing.jpg – Wikimedia Commons
{kind=link}
Di fatto il DSN-1 volò per la prima volta il 31 dicembre 1958 effettuando il primo appontaggio in navigazione con un pilota a bordo Il minielicottero pilotato Rotorcycle fu modificato per la versione iniziale del drone, il DSN-1/QH-50A. Il DSN-1 era utilizzava un motore Porsche YO-95-6 da 72 CV e poteva trasportare un siluro autocercante Mark 43. Il prototipo QH-50A (DS-1006), utilizzato per prove al 1961, fu convertito e riutilizzato nel 1964 per l’adozione di un nuovo sistema di atterraggio che diminuisse l’impatto sul ponte di volo, facilitare gli spostamenti a bordo, permettesse l’ammaraggio ed il successivo recupero. I galleggianti erano solidali ai pattini, e per l’eventuale ammaraggio venivano ruotati in posizione verticale e il mezzo risultava stabile con i galleggianti sommersi per circa il 75%, garantendo protezione e facilità di recupero il 1° luglio 1960 sul USS Mitscher (DL-2).
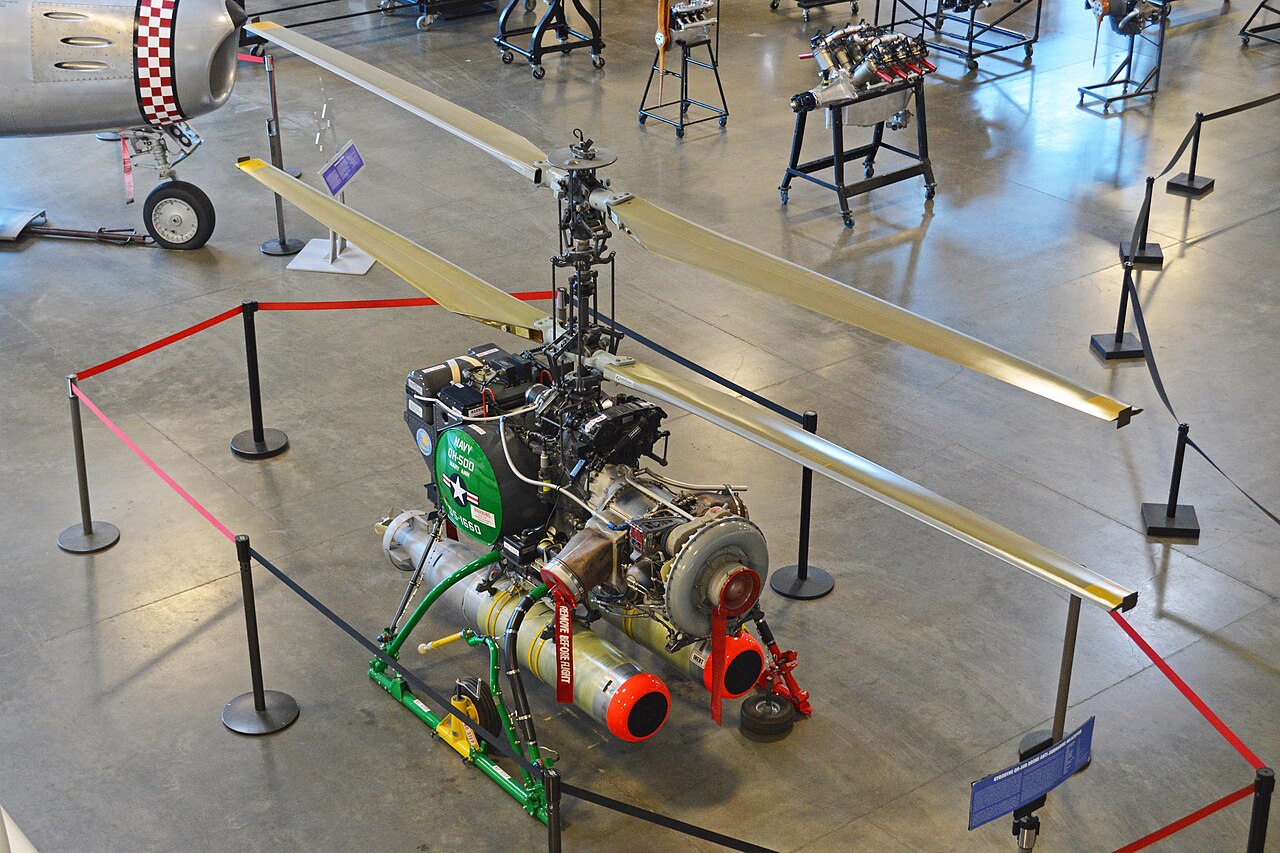
Il “DASH” era un elicottero antisommergibile a pilotaggio remoto (Drone Anti-Submarine Helicopter) utilizzato in missioni a lungo raggio armato con due siluri. Ne furono costruiti 755 esemplari tra il 1962 e il 1969, di cui 375 erano varianti QH-50D con pale del rotore in fibra di vetro e capacità di carburante aumentata. Esposto all’Aerospace Museum of California, Aeroporto McClellan, California. Fonte: Gyrodyne QH-50D DASH “DS-1660” “Mary Ann” – Autore: Alan Wilson di Stilton, Peterborough, Cambs, Regno Unito Gyrodyne QH-50D DASH ‘DS-1660’ “Mary Ann” (30144506216).jpg – Wikimedia Commons
.jpg){kind=link}
La successiva versione DSN-2/QH-50B, era propulsa da due motori Porsche YO-95-6, sempre per un singolo Mk 43. La produzione in serie del DASH iniziò con la terza versione, il DSN-3/QH-50C, propulsa da una turbina Boeing T50-4 da 255 CV (190 kW) HYPERLINK “e la maggiore potenza installata assicurò, oltre alla maggiore affidabilità, un maggior carico utile, per due siluri Mark 44, e poi per un Mk46. Sino al gennaio 1966 furono prodotti 378 QH-50C. Il QH-50C era alimentato da un motore turboalbero Boeing T50-BO-15 che sviluppava 365 HP. A vuoto, il QH-50C/D pesava ca 470 kg e, con il carburante e due siluri Mark 44, aveva un peso massimo di 1050 kg con una singola bomba di profondità nucleare Mk 57). La velocità massima era di circa 170 km/h, mentre la velocità di crociera era di 110/20 km/h con un’autonomia di poco superiore alle due ore. Il raggio d’azione effettivo di circa 50/60 km) era limitato dalla portata del radar della nave, necessario per tracciare e guidare il drone; il DASH non era generalmente dotato di sensori, anche se per impieghi particolari vennero fatti esperimenti.
.
La fusoliera del DASH era una struttura tubolare in alluminio alla quale erano fissati il motore, il carrello di atterraggio e altre attrezzature. I rotori controrotanti eliminarono la necessità di una “coda” e di un rotore anti-rotazione. Il DSN-1 e il DSN-2 erano simili al RON con equipaggio, con disposizioni per un pilota di sicurezza durante le prove a bordo mentre il DSN-3 e il QH-50D erano varianti di produzione, quest’ultimo con pale del rotore in fibra di vetro. Quando il programma fu interrotto era in fase di sviluppo la variante QH-53E, più potente (lo YQH-53E volò nel settembre 1969). La versione definitiva del DSN-3 entrò in servizio nel novembre 1962 e fu impiegata per la prima volta a bordo del Wallace L. Lind (DD-703), nel gennaio 1963. Il QH-50D migliorato entrò in servizio nel 1966.
Il primo appontaggio senza equipaggio avvenne il 7 dicembre 1960 a bordo del cacciatorpediniere USS Hazelwood (DD-531), che era l’opposto del Mitscher, una limitata conversione di un Ct classe Fletcher, la “minore” delle classi in servizio, tutte comunque progettate e costruite nella recentemente conclusa guerra mondiale. L’Hazelwood operò lungamente come nave sperimentale per il programma DASH.
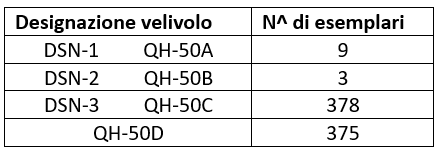
Il programma venne sviluppato rapidamente, e dopo l’impiego di una preserie di una dozzina, venne avviata la produzione in serie e tra il 1960 e il 1969 vennero consegnati alla US Navy quasi 800 droni operativi (la cui designazione dal 1962 era divenuta QH-50):
Ovviamente la produzione dei DASH era solo una parte dell’imponente programma di refitting, nella due varianti FRAM i e FRAM II, caratterizzate dalla creazione di minime sistemazioni di volo (hangar condizionato, piattaforma, servizi manutenzione e rifornimento) e segnate da interventi più o meno spinti sull’armamento ASW e sulla sensoristica, che nel caso dei sonar arrivò a includere i VDS. I tempi di consegna e la disponibilità di droni erano inizialmente inferiori a quelli del rientro in servizio della unità convertite, in grado di utilizzare il DASH; nel dicembre 1961, ad esempio, a fronte di 41 unità già convertite nessun DASH era ancora operativo.
 QH-50D DS-1526 a bordo della USS Allen M. Sumner. I rotori coassiali fornivano maggiore potenza di sollevamento, consentendo l’uso di pale più corte. Queste caratteristiche contribuivano a rendere l’elicottero il più piccolo possibile. Lo svantaggio era che le pale dovevano essere mantenute molto distanti l’una dall’altra per evitare collisioni, poiché si flettevano durante la rotazione. Ciò comportava però una maggiore complessità ed una minore manovrabilità. QH-50 05-1526 DD-692.jpg – Wikimedia Commons
QH-50D DS-1526 a bordo della USS Allen M. Sumner. I rotori coassiali fornivano maggiore potenza di sollevamento, consentendo l’uso di pale più corte. Queste caratteristiche contribuivano a rendere l’elicottero il più piccolo possibile. Lo svantaggio era che le pale dovevano essere mantenute molto distanti l’una dall’altra per evitare collisioni, poiché si flettevano durante la rotazione. Ciò comportava però una maggiore complessità ed una minore manovrabilità. QH-50 05-1526 DD-692.jpg – Wikimedia Commons
{kind=link}
A metà del 1964 risultavano in servizio 128 unità con capacità d’imbarco ma solo 50 DASH operativi. In totale, furono convertite più di duecento unità, tra grandi fregate (DL/DLG/DLGN), cacciatorpediniere (DD) e navi di scorta (DE/DEG) con un piccolo ponte di volo ed un hangar, oltre a strutture di supporto aeronautico per poter imbarcare ed operare due “velivoli” DASH.
Il drone era “pilotato” durante il decollo e l’atterraggio dall’ufficiale DASH della nave, che operava da una console adiacente al ponte di volo della nave. Durante la missione, il drone – fuori dalla portata visiva dell’unità madre – era controllato da un ufficiale posizionato in COC (Centrale Operativa di Combattimento), che lo pilotava verso l’area bersaglio utilizzando radiocomandi sia per la navigazione che per il rilascio dell’arma.
Fine I parte – continua
Giancarlo Poddighe
in anteprima un Gyrodyne Rotorcycle della Marina degli Stati Uniti in fase di test, 10 febbraio 1956 – Fonte: Archivi SDASM – Autore: Marina degli Stati Uniti Gyrodyne RON Rotorcycle 4001.jpg – Wikimedia Commons
.
{kind=link}
.
Alcune delle immagini presenti possono essere state prese dal web, citandone ove possibile gli autori e/o le fonti. Se qualcuno desiderasse specificarne l’autore e la fonte o rimuoverle, può scrivere a infoocean4future@gmail.com e provvederemo immediatamente alla correzione dell’articolo.
.

- autore
- ultimi articoli

Ufficiale del Genio Navale della Marina Militare Italiana in congedo, nei suoi anni di servizio è stato destinato a bordo di unità di superficie, con diversi tipi di apparato motore, Diesel, Vapore, TAG. Transitato all’industria nazionale ha svolto incarichi di responsabilità per le costruzioni della prima legge navale diventando promotore delle Mostre Navali Italiane. Ha occupato posizioni dirigenziali sia nel settore impiantistico che delle grandi opere e dell’industria automobilistica, occupandosi della diversificazione produttiva e dei progetti di decarbonizzazione, con il passaggio alle motorizzazioni GNV.
E’ stato membro dei CdA di alcune importanti JV internazionali nei settori metallurgico, infrastrutturale ed automotive ed è stato chiamato a far parte di commissioni specialistiche da parte di organismi internazionali, tra cui rilevanti quelle in materia di disaster management. Giornalista iscritto all’OdG nazionale dal 1982, ha collaborato con periodici e quotidiani, ed è stato direttore responsabile di quotidiani ricoprendo incarichi di vertice in società editoriali. Membro di alcuni Think Tank geopolitici, collabora con quotidiani soprattutto per corrispondenze all’estero, pubblica on line su testate del settore marittimo e navale italiane ed internazionali. Non ultimo ha pubblicato una serie di pregevoli saggi sull’evoluzione tecnologica e militare sino alla 2^ Guerra Mondiale, in particolare della Regia Marina, pubblicati da Academia.edu.